工学部
知能機械工学科
未来を支えるモノづくりに
知的に対応できる技術者を育成します。
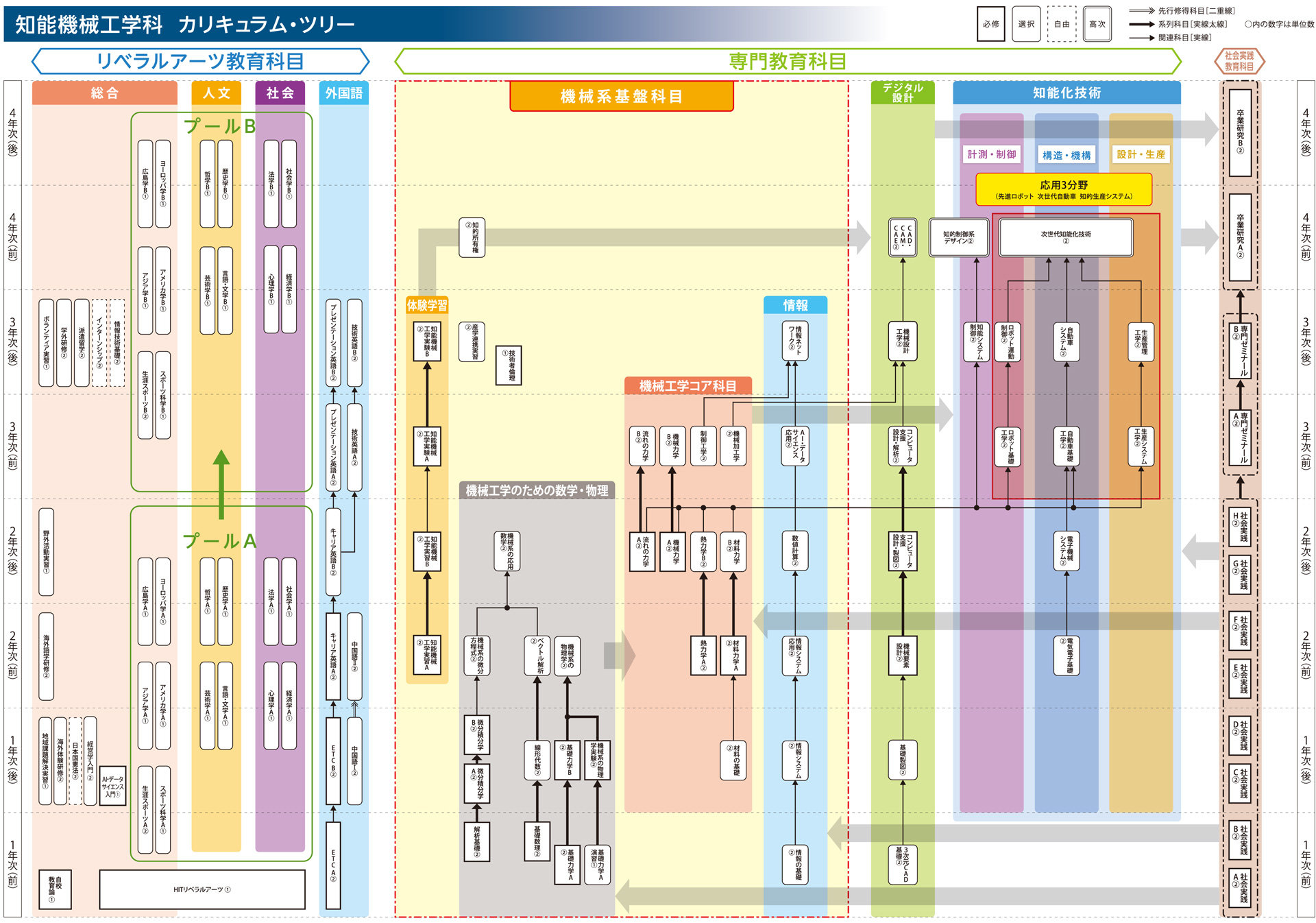
次世代自動車も、先端ロボットも、未来のモノづくりには「知能化技術」が不可欠です。知能機械工学科で、知能化技術に必要な物理・数学・機械・電気電子・情報の知識や、機械工学を基礎とした設計・制御・生産システム技術、さらにそうした知識や技術を課題解決のために選択できる力を磨くことができます。
教育研究分野
-
次世代自動車分野
自動運転などの自動制御技術が進歩する中、実物の自動車エンジンを分解する実習や、自動走行する先進自動車の開発など自動車の機能や構造、仕組み、運動性など自動車工学全般の知識を修得します。また、次世代自動車が成し遂げるべき環境・エネルギー・安全との調和技術についても身につけます。
-
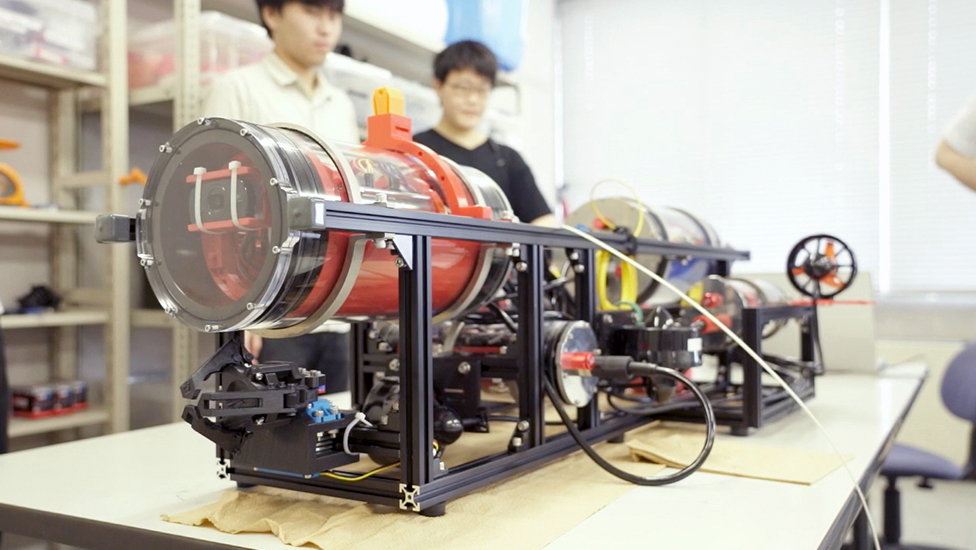
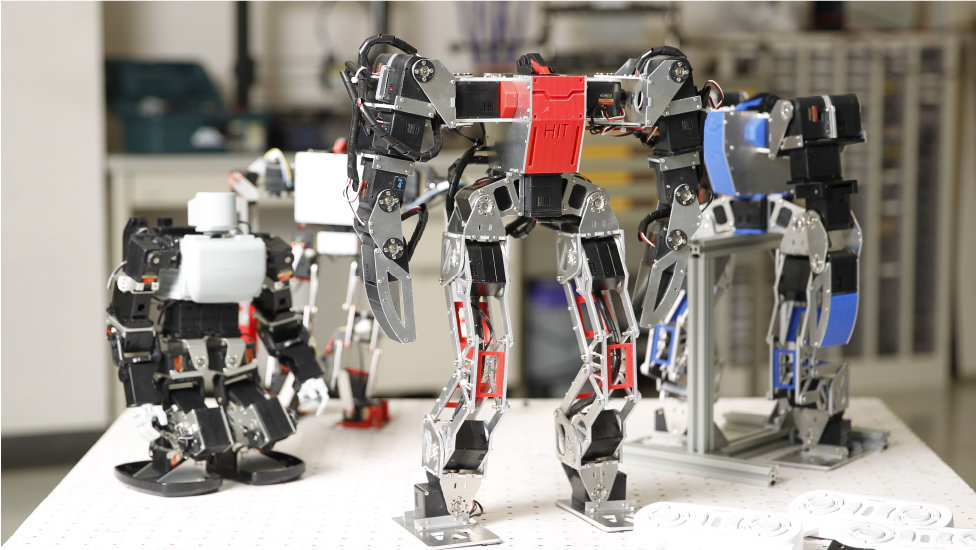
先進ロボット分野
従来は人が行っていた作業も産業用ロボットが行うようになり、ロボット導入ニーズが高まる中、ロボットの歴史から力学、産業用ロボットの仕組みまで幅広く学びます。知能機械の機構と運動制御を行うための制御システム技術を修得し、ロボット工学技術全般の知識を身につけ、人間のパートナーになれるロボットの研究・開発に取り組みます。
-
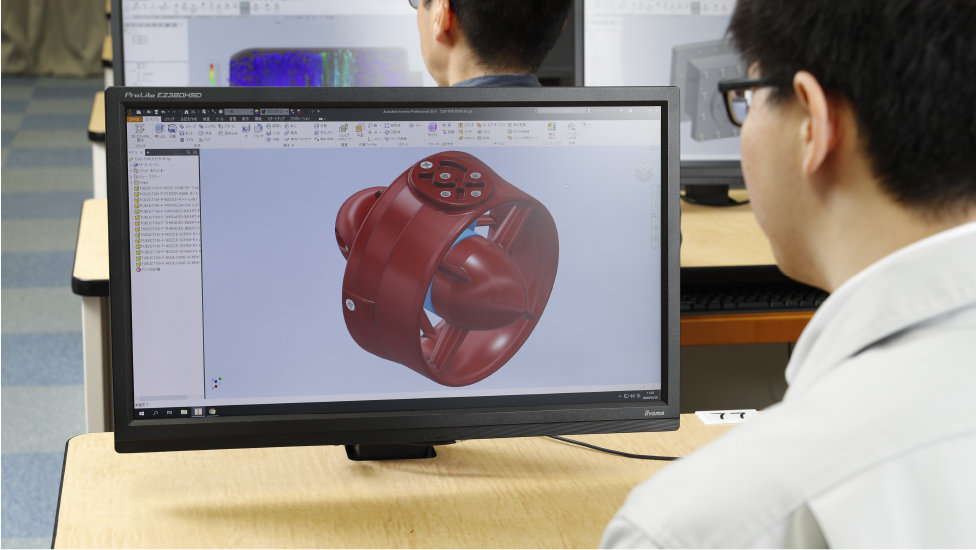
知的生産システム分野
生産性向上に必要なモノをつくる・動かす・マネジメントする技術を実験・実習を通して学びます。機械やシステムがつながることで価値を生み出す時代。3次元CADで作り出す3Dモデリングを基本に、モノづくりの基礎から各種加工法、生産システムについて理解を深め、シミュレーション技法を用いた高効率なモノづくりに必要なスキルを身につけます。
科目紹介
-

知能機械工学実習
実物の自動車エンジンをバラバラにして、シリンダーやピストンなどの大きさを計測。「大きさ」に対する概念や感覚がないとものづくりはできません。この実習では、計測技術を養うことができ、特に自動車に興味がある学生に好評です。
-
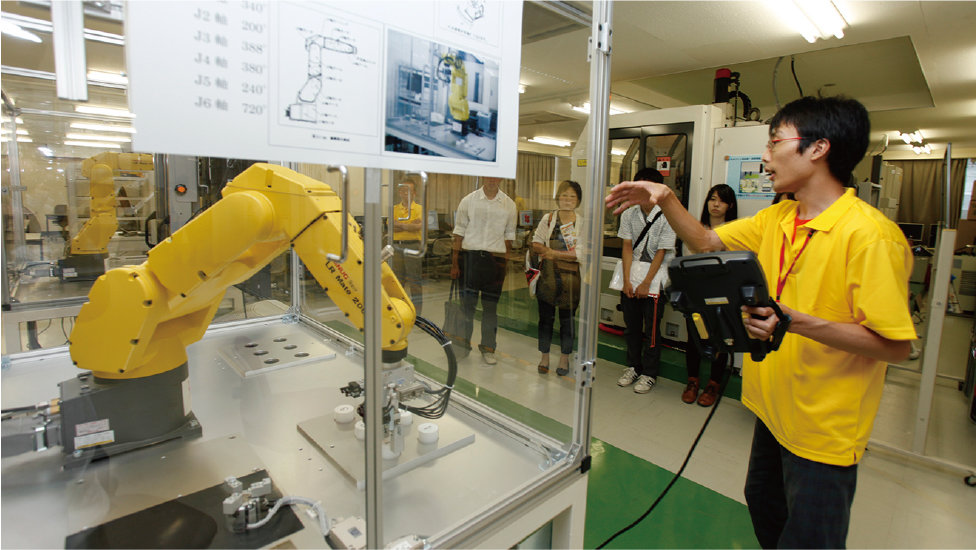
知能機械工学実験
産業用ロボットの操作を学ぶ、将来の仕事にも直結した授業。最先端の知能化ロボットによる作業シミュレーションのほか、NC工作機械、CAD・CAMの利用技術・応用技術も学び、エンジニアとしての能力を高めます。
-

自動車システム
次世代自動車が成し遂げるべき環境・エネルギー・安全の調和技術について学ぶ科目です。クルマと環境が調和したサスティナブル(持続可能)な社会に向け、未来に向けたものづくりを修得します。
-
ロボット運動制御
ロボットは今やあらゆる分野で不可欠な存在です。この授業では、ロボットの運動制御を行うための制御システム技術について、新しい制御理論も応用しながら学びます。
-
生産管理工学
品質やコスト、スケジュールなど生産管理に関するさまざまな意思決定問題の内容と最適化解析の基礎を学びます。また、生産性を高め効率化をはかるCAD・CAEによるシミュレーション技法の基本的なスキルを身につけます。
カリキュラム
就職・進学
教員紹介
-
-

池田 弥生教授
学生支援アドバイザー学位:工学士
研究内容等:リハビリテーションへの工学応用に関する研究 -

-

-

-

-

-

-

高東 浩二准教授
学位:学士(工学)
研究内容等:次世代自動車に関する研究 -

中村 一雅技術員
-

-

松岡 泰弘技師
学位:工学士
-

-

-
