情報工学科
赤羽 克仁
教員紹介

プロフィール
- 【専門分野】
-
○バーチャルリアリティ
○ヒューマンインタフェース
○ハプティックデバイス
- 【担当科目】
- プログラミング入門 、 プログラミング応用 、 技術者倫理 など
- 【研究テーマ】
-
1.高解像度ハプティックシステムの研究開発
2.ワイヤ駆動型力覚提示装置の研究開発
3.可触化技術の研究開発
- 【ひとこと】
論語の一節に
これを知る者はこれを好む者に如かず。
これを好む者はこれを楽しむ者に如かず。
とあります。
何事にも楽しんで取り組めば、きっと素晴らしい人生を送れると思います。
研究紹介
赤羽 克仁AKAHANE Katsuhito
情報学部 情報工学科 准教授
VR空間で、「硬さや質感」をリアルに伝えるためのデバイスを開発


PROLOGUE
VR空間の活用が本格化しています。ヘッドマウントディスプレイを装着してコンソールを手に持ち、VRゲームに没頭している人もきっといるのではないでしょうか。しかしVRの活用は、ゲームやエンタメに限ったものばかりではありません。医療や工業、教育といった分野での可能性も大きいと見られています。これらの分野でVRを活かす時に重要になるのが、「物の硬さ・質感をどのように手に伝えるか」。赤羽先生は、VR空間に存在するアイテムの感触を、リアルに伝えるためのデバイス開発に力を入れています。
手で硬さを感じることで、物の存在をリアルに認識できる
VRによって生み出された様々なアイテムをリアルに認識させるには、その物の硬さや柔らかさなどを手に伝えなければなりません。手の感覚で対象物を認識すると、人間はより深く、「その物は確かにそこにある」と感じるようになります。
ゲームやエンタメの世界なら、「あたった、触れた」程度が伝わるだけでも、十分楽しめるでしょう。しかし例えば、VRを医療に利用しようと考えた時、手術用メスはメスとしての硬さ・質感を持っていないと、医療従事者の手が正確に動かないかもしれません。またVR空間を利用して遠隔で工場の機械を操作する場合も、機械は本物と同等の硬さがないと、熟練の技術者もうまく操作できないはずです。
このように、リアルであろうとするほど、手で持つ感覚が重要になるわけです。そこで私は、触覚を構成する一つである「力覚」、すなわち人間が物体に触れる時に感じる感覚に焦点をあて、力覚を高解像度で人間へフィードバックする、力覚提示装置(ハプティックデバイス)について研究しています。言わば、VR空間に存在する物を手でつかみ、リアルさを感じながら自由に操作するためのデバイスを開発しているのです。

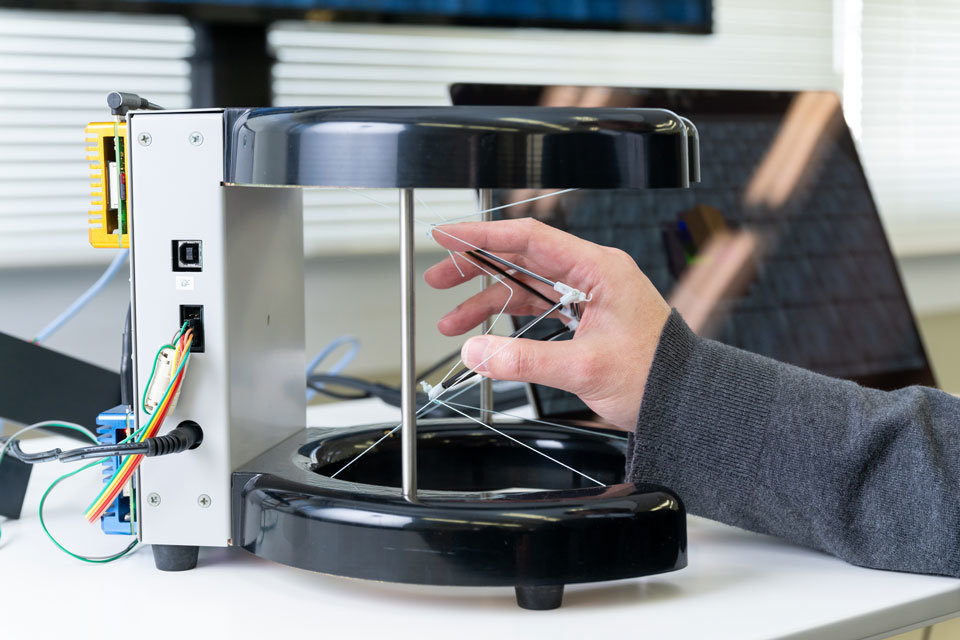
中央の正四面体(エンドエフェクタ)を
手で握ることで操作できます
VR上の物体を自由に持ち上げ、回転させる
金属で作られた枠の中に、頂点、辺の数が最も少ない正多面体である正四面体を基本構造とし、把持操作(握ること)を可能とする「エンドエフェクタ」があります。エンドエフェクタの各頂点にはワイヤが張られ、ワイヤは金属の枠に固定されたモータとプーリー(糸巻き)を介してつながっています。
エンドエフェクタは軽いカーボンパイプで構成された四面体なので、誰でもストレスなく握ることができます。握ってみると、それに応じてワイヤが反応し、動きを伝えます。すると、どうなるか?目の前のモニタに形成されたVR空間上のパズルピースが、手で握られた状態になるのです。エンドエフェクタを握ったまま手を前に進めたり戻したり、回転させたりすると、VRのパズルピースが、実際の手で操作されているように動きます。エンドエフェクタは8本のワイヤで支えられており、前後左右、上げ下げ、回転、そして把持(握ること)など、7自由度の動作に対応できるため、自然な動きになるのです。
しかしこのデバイスの真価は、「自由に動かせる」だけではありません。エンドエフェクタを通して、VRのパズルピースの硬さを手で感じることができるのです。強く握れば強く、軽く握ると軽い力覚が、手に伝わります。だから、このピースをつかむためどの程度の力が必要か、ということを自然に感じながら操作できるわけです。

モニタ上のVRパズルピースが自在に動きます
独自処理を行うための基板とプログラムを装備
「力覚を手に伝える」には、いくつものプロセスを経なければなりません。エンドエフェクタを握った瞬間にワイヤの長さがどの程度変化したか計測し、対象物があるべき位置を入力してモニタ上に表示します。また対象物の硬さや、壁などにあたった場合の衝撃を数値化してワイヤの張力を制御し、エンドエフェクタを通じて人間の手に感じさせます。これらの入出力を同時に、かつ瞬時に行わなければいけません。
パソコンモニタに展開する画像は通常、ビデオレート(60Hz程度)の周波数でやりとりされています。視覚の場合、その周波数でも違和感はありません。しかし力覚の場合、そういった低周波数では安定な力覚提示ができず、最低でも1kHz程度が必要になります。この高い周波数を、安定にパソコンで実行することは非常に困難です。そこで高い周波数による処理を独自に行えるよう、ハプティックデバイスには専用の制御基板が装着されています。これにより、30kHzの超高速な更新周波数を実現する高解像度のハプティックデバイスを実現しているのです。
もちろん、デバイスの研究開発はこれでゴールではなく、形状・構造やシステム、プログラムのレベルアップを図らなければなりません。VRを有効に活用するため、研究を続けていきたいと思います。

高解像度の操作を実現しています
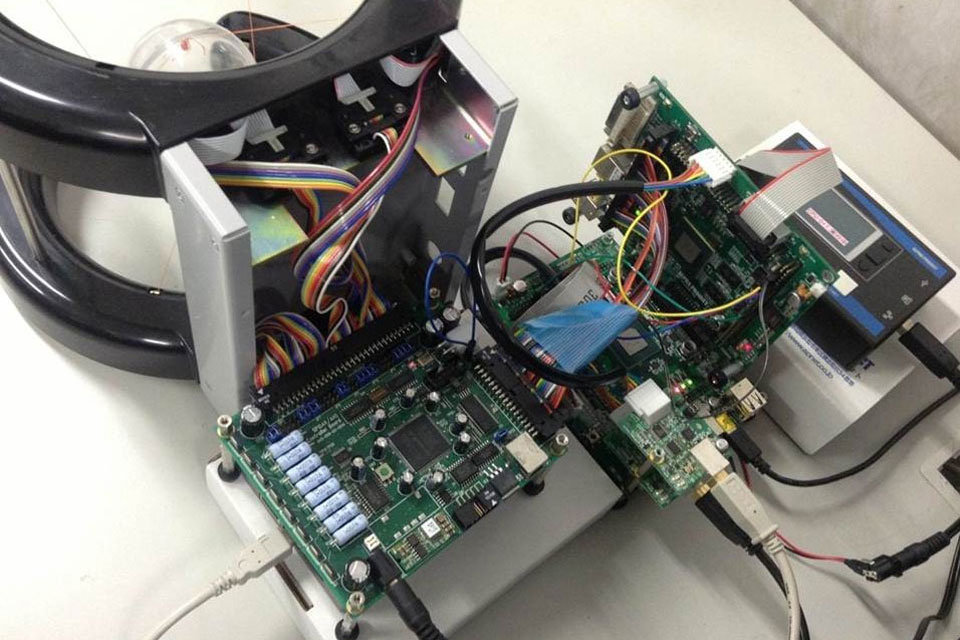
制御基板の開発も行っています