機械情報工学科
太田 利夫
教員紹介

プロフィール
- 【専門分野】
-
○制御工学
○自動車工学
- 【担当科目】
- 専門ゼミナールA/B 、 制御工学 、 自動車基礎工学 、 自動車システム 、 知的制御系デザイン 、 知能システム制御
- 【研究テーマ】
-
1.自動車の情報化(CASE)に関する研究
2.自動運転のためのSBWにおけるHaptic(人工操舵反力)制御の研究
3.自動運転シェアードコントロールに関する研究
- 【ひとこと】
工業製品は、機械・電気・情報を組み合わせたメカトロニクス(知能機械)により構成されています。3つの要素によるものづくりの楽しさを学んでください。
研究紹介
太田 利夫OTA Toshio
工学部 機械情報工学科 准教授
自動運転の時代こそ、「ステアリングの手応え」が重要になる
PROLOGUE
着々と進む「車の自動運転」。自動車メーカーだけでなく、世界の名だたるIT企業までが参入し、自動運転を実現しようとしのぎを削っています。一口に「自動運転」と言っても、その中身は自動化の達成度によっていくつかの段階に分かれます。そして、それぞれの段階で様々な技術が必要とされています。そんな自動運転の分野で研究を深めるのが太田先生です。先生はステアリング(ハンドル)を通じ、ドライバーと車が「人馬一体」となれる技術の構築を目指しています。
ステアリングは、ドライバーと車の意志をつなぐ
「自動運転」には、0~5までの6段階のレベルが定義されています。レベル0は運転支援のないひと昔前の自動車で、レベル1・2は運転支援(ADAS:Advanced Driving Assistant System)が搭載されている、普段の日常で見かける自動車がこの分類になります。レベル3以上が自動運転となり、限られた状況・走行条件においてはシステムが車を操縦するが、それ以外ではドライバーが車を操作する「条件付自動運転車」の段階がレベル3。大半の状況においてシステムが車を操縦するが、限られた領域のみドライバーが操作する「自動運転車」の段階がレベル4。そして、あらゆる状況でシステムが車を操作する「完全自動運転車」の実現がレベル5です。どのレベルをめざすかは車の用途によっても分かれ、トラックやバス・タクシーなど公共性の高いものは、なるべく早くレベル4に到達させようとしています。一方、自家用車などの一般車はまずレベル3、次にレベル4へと進めています。
レベル3では、ドライバーが「運転したい」と思ったらいつでも運転でき「任せたい」と思ったらシステムに運転を委ねられる。そんな風に、ドライバーとシステムが協調し合う「シェアードコントロール」が欠かせません。
そこで重要なのがステアリングです。ドライバーは、ステアリングから伝えられる振動や反力から、走行状況や路面状態を把握します。またドライバーはステアリングを通して、どのように操作したいか車に伝えます。言わばステアリングは、ドライバーと車の意志をつなぐ大事な仲介者なのです。
タイヤが受ける情報を体に感じることで、より適切な運転ができる
今までステアリングと車は、機械的につながっていました。だから、車の振動や反力が直接伝わっていたのです。しかし自動運転を前提とすると、機械的ではなく電気的な接続、すなわちステア・バイ・ワイヤ(SBW)が主流となります。TVゲームでカーレースを遊ぶ時に、ハンドル型のコントローラで操作する人も多いでしょう。ハンドルを右に回せば、画面上の車は右に動きます。でも、ハンドルと車が直接つながっているわけではなく、コントローラの電気信号にゲーム機が反応しているだけですよね。ゲーム機と同じように、SBWだと実際の車もそのような状態になります。ステアリングを通じて、タイヤの受ける振動や反力がドライバーへ伝わることがなくなるのです。もちろん、振動などをグラフ化してモニタ表示することは可能でしょう。しかし人間は、目から入る情報のみで判断しているわけではありません。車を適切に制御するには、手から伝わる情報も大事なのです。
そこで、今どういった状態なのか、ステアリングで人工的に正確に再現する仕組みが必要になります。私たちはそういった、ハプティック(触覚)な情報をドライバーに伝えるシステムについて研究を進めています。

つなぐシステムを研究
シェアードコントロールによる「操る歓び」の実現
具体的には、反力モータを用いて人工的に反力(手応え)を生み出し、クルマの状態を伝える自動運転システムとドライバーのシェアードコントロールの研究を行っています。システムを構築する上では、MBD(Model Based Design)を活用しています。MBDとは、コンピュータ上でシミュレーション可能な「モデル」を作成し、そのモデルを中心に設計・検証を進める開発手法です。従来の設計手法と違い、実機検証までにモデルによる検証を進めることができ、品質向上と工程・コスト削減を同時に達成できる手法です。こうした実践的な手法を採り入れる研究が、地元産業界から高く評価されているのです。
そしてSBWの長所は、ドライバーの操作をシステムがうまくサポートできる、という点にあります。例えばドライバーがハンドルを切りすぎても、システムが違和感なく修正して車を安全に動かせます。そういったサポートをドライバーが体感することで、「こういう状況ではこう操作するのか」と学習する効果もあるでしょう。ドライバーとシステムのインタラクション(相互のやりとり)を可能とすることで、「操る歓び」を実現させるわけです。
自動車メーカー各社は、自動転転や電動化が進む時代だからこそ、単なる移動ではない「移動(モビリティ)の品質(QoM: Quality of Mobility)」を「操る歓び」、「移動体験の拡張」、「脱・操る歓び」の観点で追求しています。
2050年の自動運転レベル5によるモビリティ社会までのQoMとしての操る歓びをシェアリングコントロールとして実現させる研究をしています。
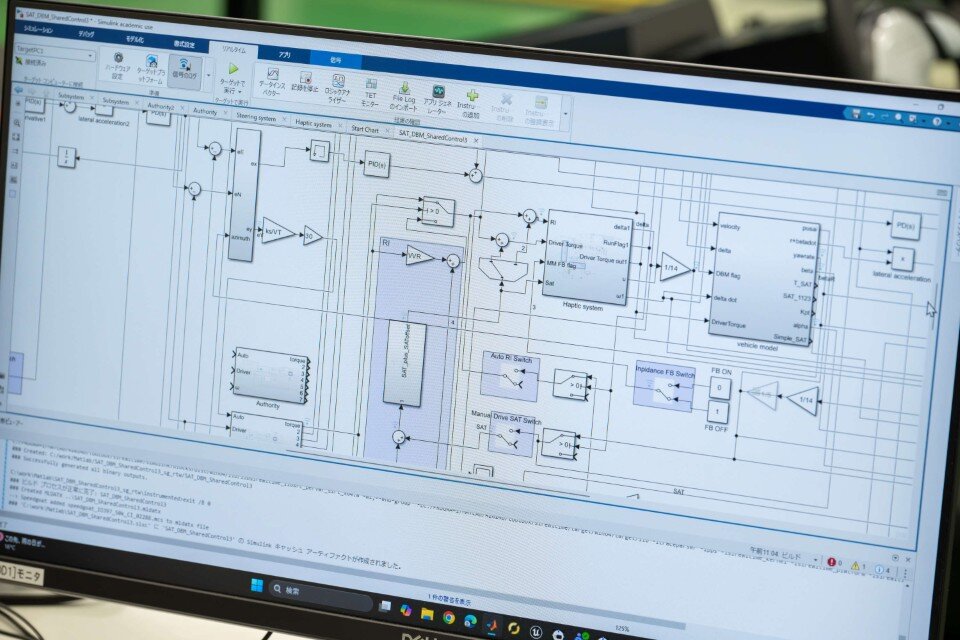
MBDを使っています